基於環境感知與大型語言模型之智慧機器人自主決策系統開發
隨著工業自動化程度與智慧製造的快速發展,工廠與倉儲場域中大量導入各類電氣設備與工業氣體,使得火災與氣體洩漏等工業安全風險日益受到重視。電氣設備老化或長時間高負載運作,容易引發電氣火災,而氫氣、烷類等易燃氣體一旦洩漏,可能造成爆炸或火災事故;此外,部分工業氣體具有毒性或窒息風險,且多為無色無味,早期不易察覺,增加環境監測與安全管理的困難度。因此,如何透過智慧化技術即時掌握環境異常狀況,並降低人員直接暴露於高風險環境中的機會,已成為智慧工業安全領域的重要研究課題。
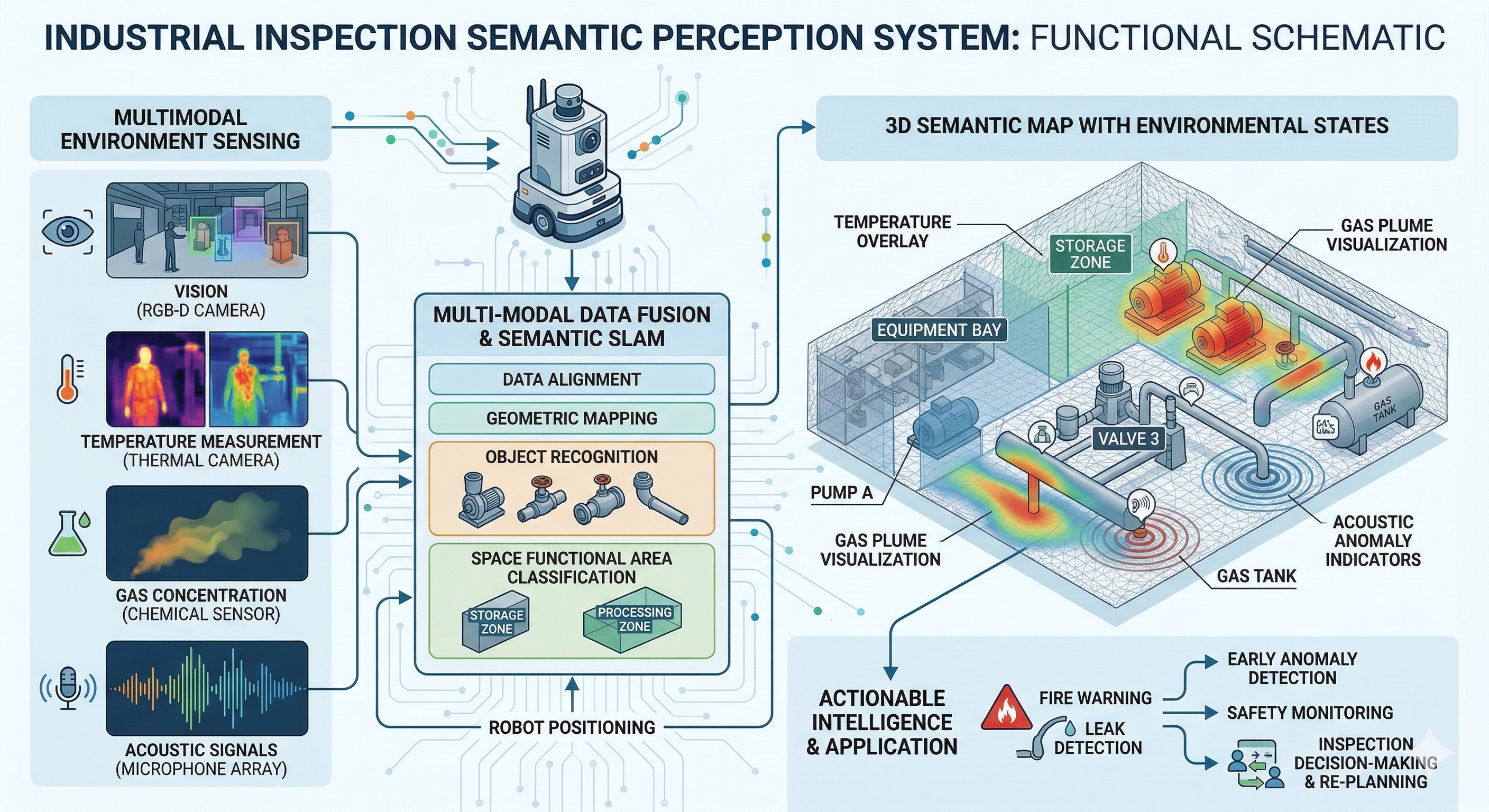
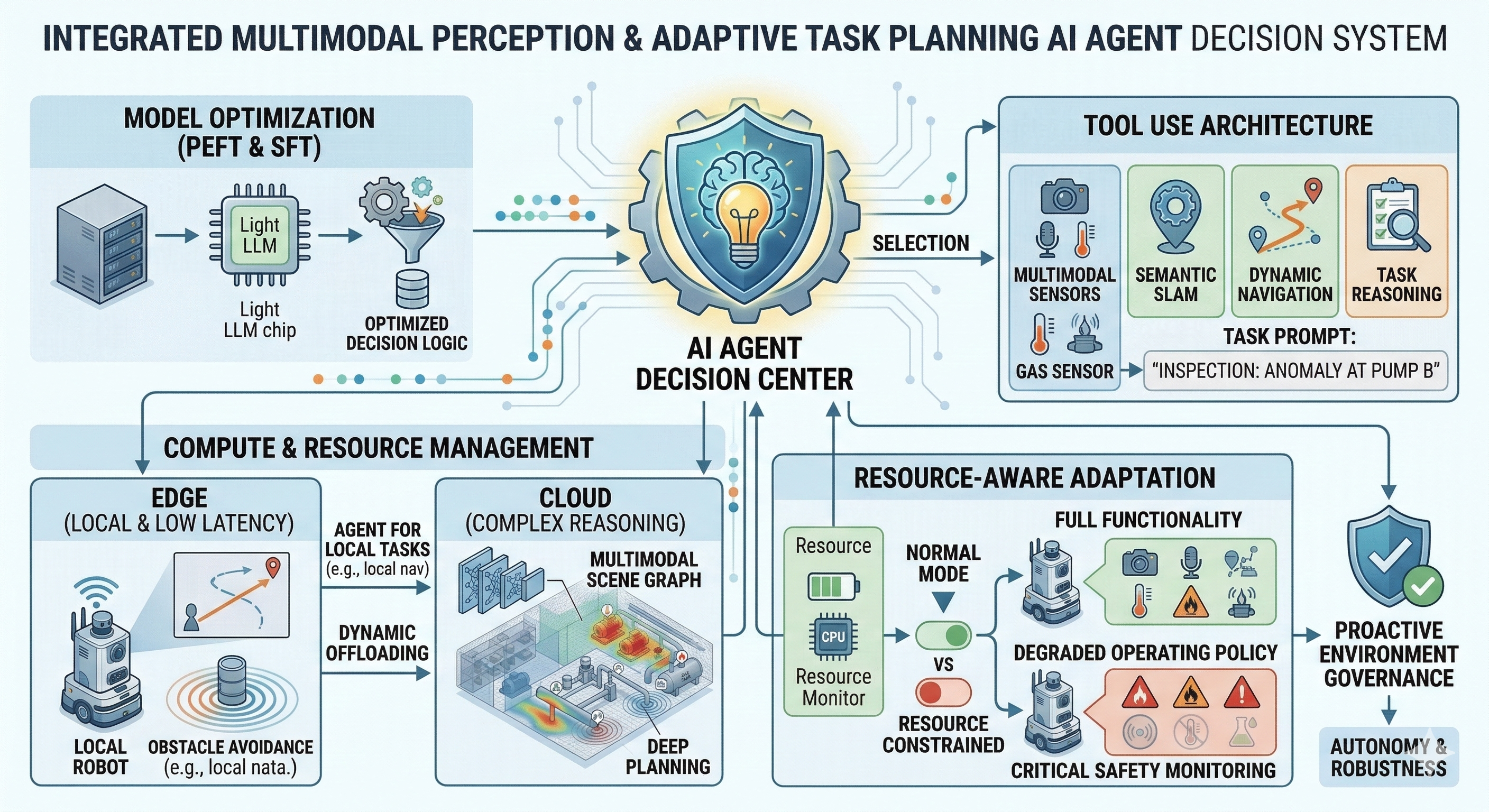
近年來,隨著機器人技術、感測技術以及人工智慧的快速發展,將智慧機器人應用於工業巡察與環境監測逐漸成為一項重要的研究方向。透過具備自主移動能力的巡察機器人,可在工廠與倉儲場域中進行長時間環境巡檢,並即時蒐集環境資訊,以協助管理人員掌握現場狀態並及早發現潛在危害。本研究將結合同步定位與地圖建構(Simultaneous Localization and Mapping, SLAM)技術與大型語言模型(Large Language Model, LLM),建立具備環境理解與任務推理能力之智慧巡察機器人。透過語意地圖建構與環境資訊整合,使機器人能理解場域中不同區域與設備之語意關係,並依據任務需求自主規劃巡察路徑與執行環境監測任務。
此外,本研究亦整合多模態環境感測資訊,以偵測場域中可能出現之溫度異常或氣體洩漏情形,並透過語意分析與環境推理能力,判斷潛在風險位置並回報環境狀態。透過上述技術整合,期望建立一套具備環境感知、語意理解與自主巡察能力之智慧機器人系統,使機器人能在複雜工業環境中進行持續監測與異常偵測,提升工廠與倉儲場域之安全管理效率,並降低潛在災害所造成的人員傷害與設備損失。
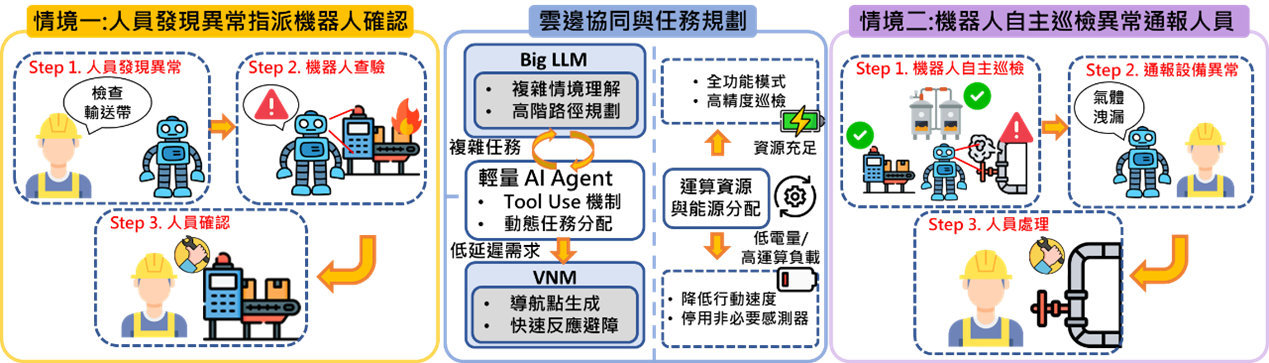
圖1、系統架構圖